CONSERVATION OF ANGULAR MOMENTUM
APPARATUS
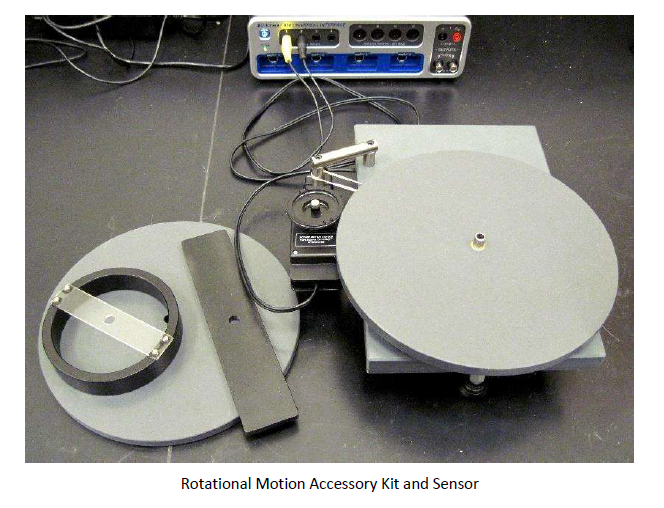
Rotary motion sensor, Rotational motion kit with accessories, level tube, vernier calipers, data logger/acquisition system, computer system.
THEORY
This experiment is designed to familiarize students with the concept of angular momentum and to validate the law of conservation of angular momentum.
Symbols and Notation
Before proceeding with the theory, the following symbols and their definitions are explicitly defined:
| Symbol | Definition | Units |
|---|---|---|
| $\vec{L}$ | Angular momentum vector | kg·m²/s |
| $\vec{r}$ | Position vector from reference point to particle | m |
| $\vec{v}$ | Linear velocity of particle | m/s |
| $\vec{p}$ | Linear momentum of particle | kg·m/s |
| $m$ | Mass of particle | kg |
| $N$ | Total number of particles in system | --- |
| $\omega$ | Angular velocity of rotation | rad/s |
| $I$ | Moment of inertia about axis of rotation | kg·m² |
| $\tau$ | Torque (rotational force) | N·m |
| $t$ | Time | s |
Angular Momentum of a Particle
The angular momentum, $\vec{L}$, of a particle with mass $m$ and linear velocity $\vec{v}$ with respect to a fixed reference point (typically the origin) is defined as:
$$\vec{L} = \vec{r} \times \vec{p} = \vec{r} \times (m\vec{v})$$
where:
- $\vec{r}$ is the position vector locating the particle relative to the fixed reference point
- $\vec{v}$ is the linear velocity of the particle
- $m$ is the mass of the particle
Angular Momentum of a System of Particles
For a system of $N$ particles, each with position vector $\vec{r}_i$ and linear momentum $\vec{p}_i$, the total angular momentum about the fixed reference point is the vector sum of individual angular momenta:
$$\vec{L}_{total} = \vec{L}_1 + \vec{L}_2 + \cdots + \vec{L}_N = \sum_{i=1}^N \vec{L}_i$$
Angular Momentum of a Rigid Body
To develop the angular momentum expression for a rigid body, we model it as a system of particles with mass $m_i$ that undergo identical rotational motion about a fixed axis. The net angular momentum along the axis of rotation is:
$$\vec{L} = \sum_{i=1}^N \vec{L}_i = \sum_{i=1}^N m_i (\vec{r}_i \times \vec{v}_i)$$
For rotational motion, the relationship between linear velocity and angular velocity is:
$$\vec{v}_i = \vec{\omega} \times \vec{r}_i$$
Substituting this into the angular momentum equation:
$$\vec{L} = \sum_{i = 1}^{N} m_i \left[ \vec{r}_i \times (\vec{\omega} \times \vec{r}_i) \right]$$
Using vector algebra, this simplifies to:
$$\vec{L} = \vec{\omega} \sum_{i = 1}^{N} m_i r_i^2$$
Moment of Inertia
The moment of inertia, $I$, of a rigid body about the axis of rotation is defined as:
$$I = \sum_{i = 1}^{N} m_i r_i^2$$
This represents the rotational equivalent of mass in translational motion.
Angular Momentum of Rotating Rigid Body
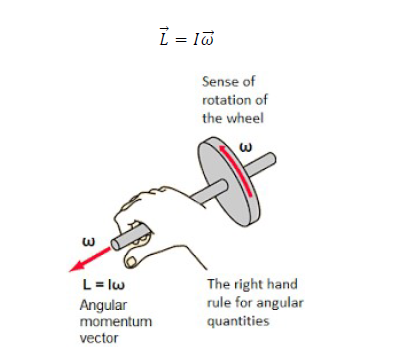
Using the definition of moment of inertia, the magnitude of angular momentum along the axis of rotation for a rigid body rotating with angular velocity $\omega$ is:
$$L = I\omega$$
Conservation of Angular Momentum
Newton's second law in angular form relates torque and angular momentum:
$$\vec{\tau} = \frac{d\vec{L}}{dt}$$
The angular momentum of a system of particles around a point in a fixed inertial reference frame is conserved (remains constant) if there is no net external torque around that point:
$$\frac{d\vec{L}}{dt} = 0 \quad \Longrightarrow \quad \vec{L}_{\text{total}} = \text{constant}$$
This means:
$$\vec{L}_1 + \vec{L}_2 + \cdots + \vec{L}_N = \text{constant}$$
Note that the total angular momentum L is conserved. Individual angular momenta may change, provided their sum remains constant.
Experimental Setup
The experiment uses a base solid disk that is free to rotate about a vertical spindle. A rotary motion sensor records the disk's angular velocity. The base disk is spun and another object (disk, ring, or plate) is carefully dropped onto it, resulting in a change of angular velocity. The initial and final angular velocities are used to validate conservation of angular momentum.
If $\omega_i$ and $\omega_f$ denote the angular velocities just before and after the drop respectively, the initial and final angular momenta are:
Initial angular momentum (base disk only):
$$L_{\text{initial}} = I_{\text{base}} \cdot \omega_i$$
Final angular momentum (base disk + dropped object combined):
$$L_{\text{final}} = (I_{\text{base}} + I_{\text{dropped}}) \cdot \omega_f$$
According to conservation of angular momentum:
$$L_{\text{initial}} = L_{\text{final}}$$
$$I_{\text{base}} \cdot \omega_i = (I_{\text{base}} + I_{\text{dropped}}) \cdot \omega_f$$